|
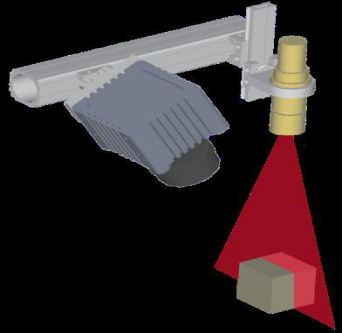
3D视觉原理 1、将一条单线细激光投射到物体表面,由于物体表 面高度变化,使激光线发生了弯曲,根据这条线的变形,可以精确计算出物体表面的高度信息; 2、面阵相机获得物体表面的X-Y平面信息。利用相关软件将高度信息和平面信息解析成物体的三维信息; 3、利用数字三维信息,引导机器人做出预定的动作。 |
|
|
行业痛点: 1、机器人焊接时,焊接工装定位不准导致的焊接偏差; 2、焊件变形导致工件高低不平产生偏差; 3、焊接前的缝隙宽度不均导致焊接虚焊。
解决方案: 1、利用3D激光视觉系统引导焊接机器人的焊枪,沿着焊缝精确移动; 2、反向控制焊接控制器,自动调节电流大小;
应用行业: 1、汽车行业车身、底盘等的焊接; 2、压力容器的焊接; 3、动车行业精密焊机件的焊接。
|

|
|
行业痛点: 1、化工、饲料、橡胶轮胎类厂家拆垛时利用人工, 劳动强度大、效率低、人力成本高; 2、编织袋在托盘上形状和位置不规则。机器人拆垛 无法按照预编程的形式进行。 |
|
|
解决方案: 1、利用3D激光视觉系统获取编织袋的三维坐标信息; 2、引导机器人准确的抓取编织袋。
应用行业: 1、化工、饲料、食品、橡胶轮胎类拆垛作业; 2、可拓展应用到化工桶、纸箱等拆垛作业。
|
|

 15315450859
15315450859 0535-2162897
0535-2162897 sales@haizhichen.com
sales@haizhichen.com
